
To save you a significant amount of trouble and wasted time:
The Cixin Liu book (and its two sequels) are great, and you should read all three immediately.
The Netflix series is terrible and you should watch literally anything else.
The popular explanations popping up on “the real three body problem”: on why it’s “unsolvable” or “unsolvable analytically”, are wrong. We’ve had general analytic solutions to the three body problem for 117 years now.
The last point probably requires a bit of explanation. Because I’m up against statements from the BBC (More or Less) and from all the usual popular science sites, quoting various professors of physics saying explicitly that there is no solution to the three body problem (or no “analytic solution” if they’re being careful), and also that there cannot be. They might even mention Poincare as the person who proved this.
Yes, they’re all wrong.
First of all, what is the three body problem? This one at least is easy. It’s the mathematical challenge of solving Newton’s equations of motion for three bodies interacting via gravity.
It’s a specific example of the n-body problem. The one body case is trivial - the body just sits there. Some body in deep space will sit there and do nothing. It can be written very simply.
The acceleration of a body in the absence of any external force is zero. So it will continue at rest or travelling in a straight line at a constant speed (a statement also known as Newton’s first law); and the undetectability of any difference between these two states being a quiet illustration of the principle of relativity. But - in itself - trivial.
The first interesting one is the start with the two-body problem. Here it is.
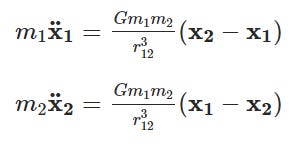
What does this mean? It means that if you have two bodies attracting each other via gravity (say, the earth and the moon) then you can write down these two equations, which both roughly say that the acceleration each body experiences is down to the Newtonian attraction from the other one, and will be in the direction of the line between them.1

There is a well-known (and very neat) approach to solving these two equations that is taught in all intermediate courses in Newtonian physics. The steps go like this, together with my rough reactions when I step through them.
Substitute in an “effective” mass term and transform your point of view to a centre of mass frame to reduce it to a problem of central potential (Sure, standard step for every multiple-body problem)
Move to polar co-ordinates. (Makes sense given the radial symmetry of the situation).
Eliminate the time variable (Standard again).
Substitute u = 1/r. (Black-magic fuckery, where did that come from? …. But now we can integrate it, giving the equation of an ellipse, a hyperbola, or a parabola — the type of curve depending on the initial conditions.)
This approach works by quickly searching out and exploiting the constants of motion (the linear momentum of the centre of mass, the various angular momenta, and the total energy of the system) to simplify the problem down. And black-magic fuckery.
Anyway, this process allows you to write down the equation of this curve as a function of the radius r and angle θ, and you can do this analytically. That is, it can be written in a finite number of functions and terms from a general accepted set of “allowed” ones. This “allowed” set includes algebraic functions, exponentials and indefinite integrals, and not usually much more than that.
This definition of “closed form” looks pretty arbitrary. Why choose those set of functions, why specify a finite set of them, and so on? What it tries to do is capture a sense in which the orbit can be calculated in some “manageable” form — at least manageable in the pre-computer age when all calculations had to be done by hand.
Before we leave the two-body case we should note one more interesting thing. There is a reasonable sense in which the two-body case is not “solvable” either.
The procedure outlined above gives you an equation for the shape of the orbital curve a body produces, but considering where we started (two second order differential equations in terms of r and t) you might have been expecting a solution of r and t. It is not usually mentioned, but it is not generally possible to write down a closed form expression for r as a function of t, even for the two body problem. And we might be troubled by this. What if we want to wind time t forward and solve where the body will be relative to another at a specific time? It turns out that we cannot write down such an expression in closed form (though a variety of parametric forms can be produced for as general cases as you could wish).
Now, no-one cares about the lack of an explicit, finite, analytic form for the function r(t). It’s not important because we can derive any property that we find interesting from other forms of equation (e.g., the elliptical solution, or the parametric forms). And if we really want it in precisely that r(t) form, there are plenty of tractable numerical approaches we can solve with a computer.
But it’s interesting that we can make the two body problem “unsolvable” or “unsolvable analytically” in a certain sense, so long as we put enough restrictions on what counts as a “solution”.
Three-body problem:
It looks like this:

That is, very, very similar to the two-body problem. We’ve just added an extra body (Earth, Moon, Sun for example), and we have to take account of all their interactions. And it’s much harder to attack.
There are certain special cases of orbits that can be solved in a similar way to the two body problem. Euler and Lagrange found some of the most important classes early on. These were usually cases in which the solution has some special property of symmetry, or in which one of the bodies can be considered with negligible mass.
But no way of finding general solutions could be found for many, many years. This became such a problem that in 1888 King Oscar of Sweden and Norway put forward a famous prize: the challenge was to come up with a particular sort of solution to the three body problem (he set restrictions that made it clear it had to be analytic, and he allowed infinite series, so long as they converged for all reasonable values of the variables).
At the time, no-one was able to meet the conditions as written, but Henri Poincare won King Oscar’s prize with a paper that moved forward mechanics in various important ways. It included an impossibility proof, of a type that was also presented by Heinrich Bruns at about the same time. This showed that the n body problem has no integrals, algebraic with respect to time, position and velocities of the n particles, other than the special cases already uncovered (at that point there were 10 types in all).
Why is this important? The whole episode was very important historically for the development of the understanding of differential equations. For Poincare’s work uncovered the strange nature of some of the orbits: they are what we would now call chaotic - arbitrarily sensitive to initial conditions - and are the first known examples of such systems. (Poincare himself misunderstood these orbits and asserted at first that they were stable, which they are very much not - a critical plot point in Cixin Liu’s book).
But what Poincare and Bruns’ impossibility proof showed is that there are no closed form solutions producible by a certain method of integration. And this is certainly important: it shows that there are not enough constants of motion of the appropriate type that we can exploit in the way that we exploited them to produce the solution to the two-body problem.
This is sometimes now paraphrased into saying that general analytic solutions to the three body problem cannot exist. And this is wrong.
Because it soon soon turned out that we can produce solutions by other methods. In 1907 the Finnish mathematician Karl Sundman developed a series approach for (almost) all initial conditions that actually solves the three body problem. He did not try attacking it with anything close to the methods that Poincare and Bruns had earlier shown impossible, but went a completely different route and developed a series solution in powers of t. This series converges (though very slowly) for all cases where the angular momentum is non-zero.
This solution - although infinite - uses fully analytic terms and certainly fulfils King Oscar’s prize conditions (he explicitly admitted infinite series, so long as they converged.) To reject it, you’d have to add some new condition like “no infinite series - even if they converge”, while also making sure you are still allowing solutions to the 2-body problem. But this is not what the most famous challenge said, it’s not what “analytic solution” means, and it’s pretty blatantly “tailored” specifically to exclude Sundman (and further work on the general n case by Wang and Babadzanjanz)
A better reason for objecting to a Sundman-like approach is that it’s not very practically useful: it exhibits very, very slow convergence in most cases. So it’s pretty useless for practical calculations: you have to calculate thousands of terms to get an accurate answer. But here we can switch horses: we have good numerical methods for the three body problem that — with the aid of computers — give us very accurate solutions to any degree of precision we please (though here, the chaotic nature of many orbits adds spice to the situation when we try forecasting many millions of years ahead).
Washing up: in most senses you can name, the popular lore about the three body problem is simply wrong. The three body problem is solvable. Solutions have been around for 117 years. The sense in which it is “unsolvable” is an arbitrary one. Poincare-Bruns’ impossibility of integrability proof shows very important things about the system - and in particular it shows that the three-body solutions are far richer and more interesting than the two-body ones. But it doesn’t show it is unsolvable, or even that it’s unsolvable analytically. And the same is true of the general n-body problem. In 1991, Quidong Wang demonstrated a power-series approach to the n-body problem that excludes only collision cases.
However, there’s one sense of “solved” which should not be allowed to apply. And that is the sense in which “solved” means “there’s no more to discover”. There is still a great deal to discover in the n body problem. The existence of Sundman and Wang’s series solutions does not reveal much about the character of the orbits that are admitted.
New solutions with new characters are being discovered all the time. In this sense, the problem will be keeping people busy — and producing new insights — for the foreseeable future.
Anyone wondering why r^3, rather than r^2, should look at the vectors. One r cancels.
Something spooky here. Just finished binge-reading the triology (perfect reading for a short stay in hospital) & up pops this! Thanks for the explanation.